![]() 3
Motor 6 Legged walker
3
Motor 6 Legged walker![]()
<HeXaPoD>
--- And a FAST walker at that ----
![]()
ABOUT:
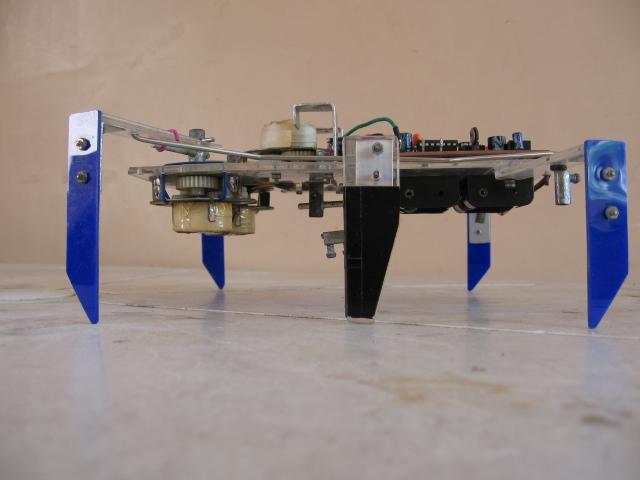
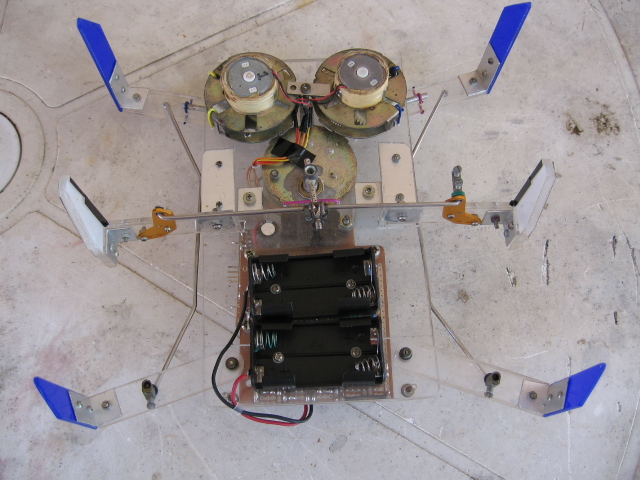
This is a six legged, 3 motor walker. can turn on a dime (left or right), or reverses if both tactile switches are activated. Original circuit was from a microcore with 4 individual outputs. I designed & modified the logic controlling circuit with a bicore for a more better walking gait (movement). Mechanical design is standard for 3 motor 6 legged.
anyways, it works fine....and really walks fast , depending on the type of motors used (speed, torque)....
This bot was done way back 2002... And I have currently dis-assembled the HEAD .. needed upgrading, still have not found the right gearmotor YET. Video shown has NO head and I removed the tactile sensors... sorry 3M_6L
SPECS:
-motor used : from C -ROM drive, the one that opens/closes the CD tray
-gears : from 15RPM crystal ball motor (hacked, gears used with CD-ROM motor)
-final gearmotor: 73RPM @5V drawing 40mA, no load
-power supply : 4.8VDC Ni-Cd battery (1.2VDC Ni-Cd x 4pcs)
![]()
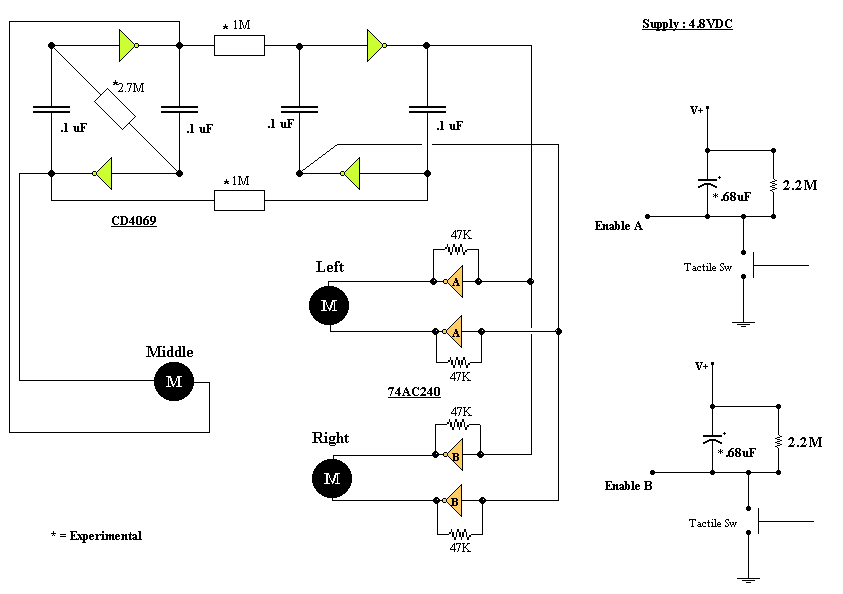
This is the circuit I have come up.... a BiCore + a 74xx240 as a MUX inverter for turning Left or Right...OR reverse..if Both tactiles are activated
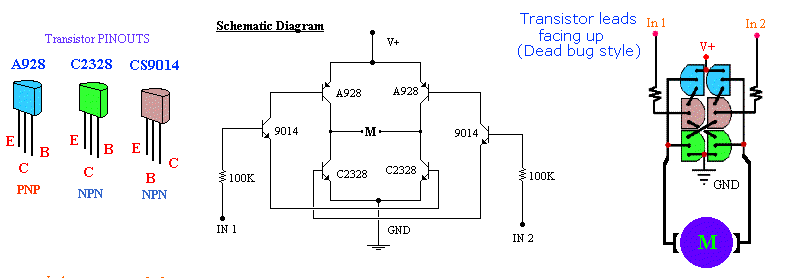
And HERE is the H-bridge used as motor drivers...
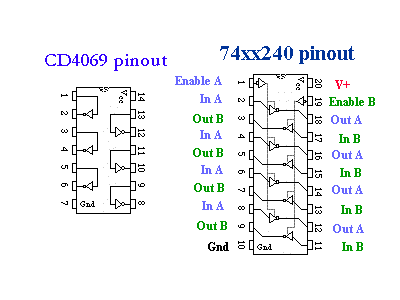
CHIP pinouts:
![]()
PICTURES
(640 x 480) for faster page loading ^_^
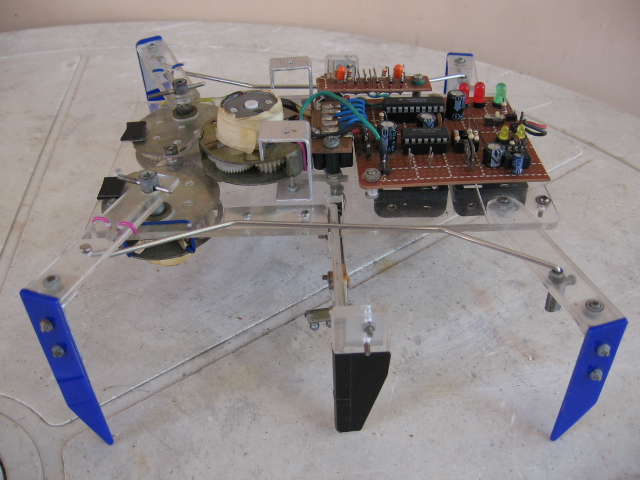
FRONT / TOP VIEW:
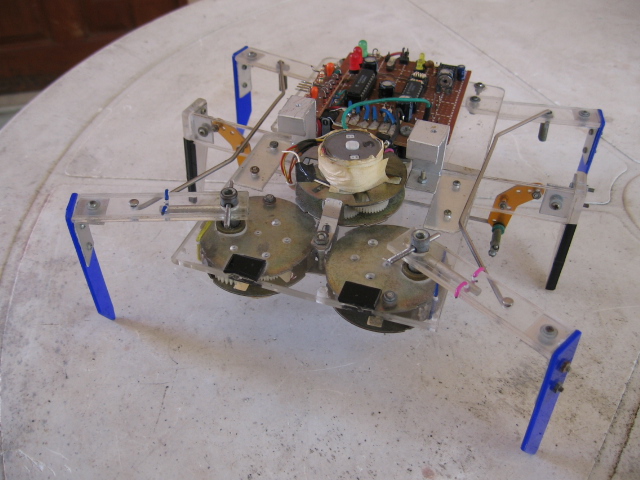
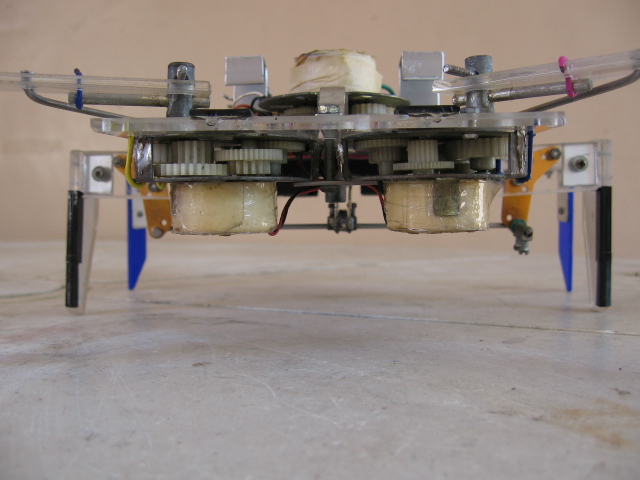
SIDE VIEW:
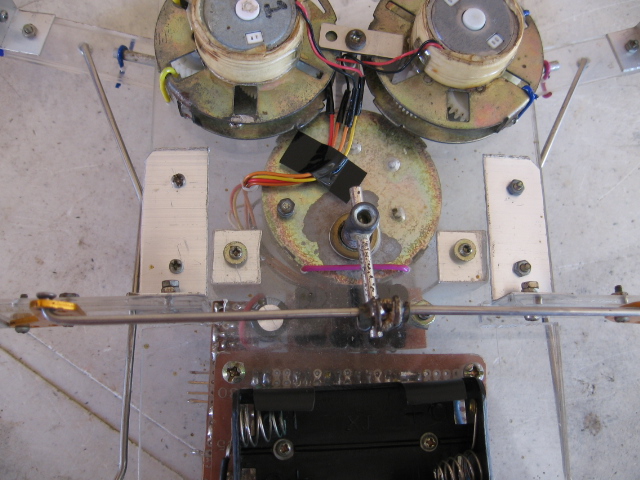
SIDE / TOP VIEW:
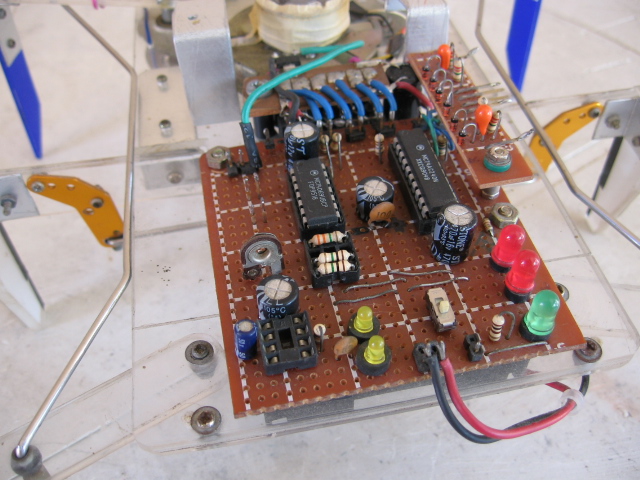
THE CIRCUIT BOARD :
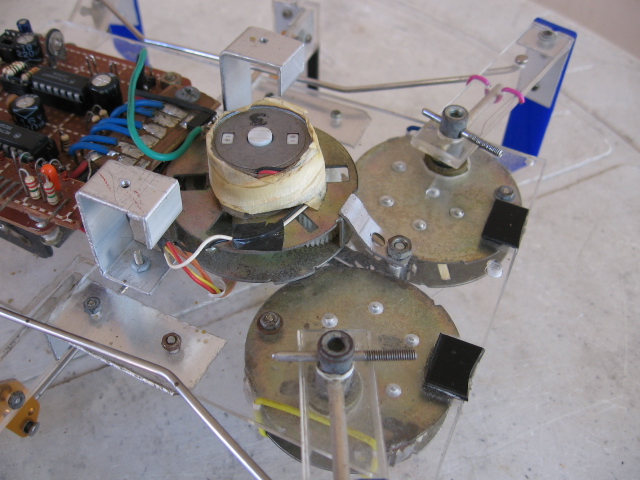
THE MOTORS
DEAD BUG :-)
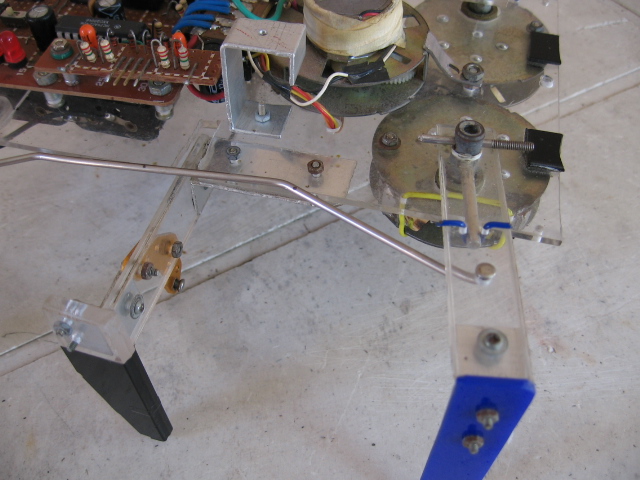
LIFT MOTOR + Linkage :
SIDE + Horizontal LEG linker
THE GEARS / MOTORS underside
![]()
VIDEOS:
![]()
Copyright
©
2005 by
Ralph R. Cañas.
All Rights Reserved.
![]()
![]()
BEAM Patents by Mark W. Tilden.
Special thanks to: Solarbotics for giving me this web space (thanks Dave) , Mr. Mark Tilden (BEAM is nothing without you)

DONT GIVE UP!!! LET THAT ROBOT GO n WALK on ITS OWN :-)
![]()
Visitor since December 2005:
BACK TO BEAM MAIN
![]()