![]() 3
Motor 4Nv walker
3
Motor 4Nv walker![]()
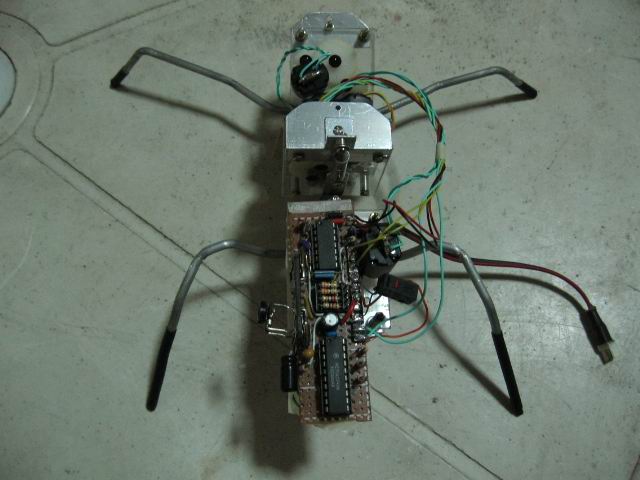
--- A 3-motor 4-legged walker ----
This was an attempt to make a 3 motor walker using 4 Nv core.... It started out last October.. I have read and read from other sites and forum posts that 3 motor walkers have big strides and tall steps compared to 2 motor 4 legged walkers.... that's why I made this walker...AND it really is true.. It has the combination of LIFT + SPEED.... compared to conventional 2 motor walkers... :)
SPECS:
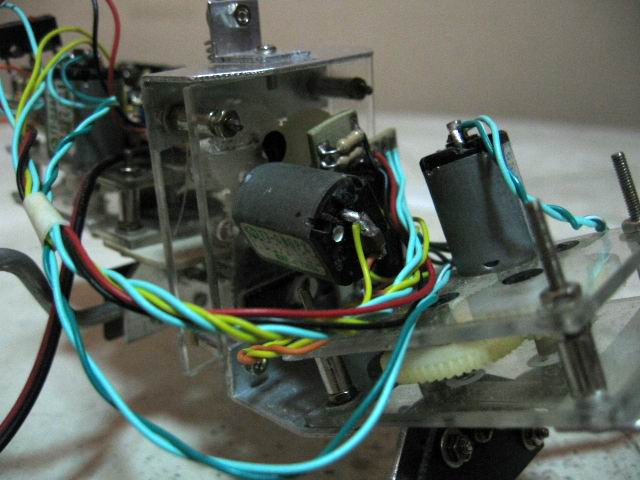
-motor used : mabuchi F030 series
-gears : from 5/6RPM crystal ball motor (hacked, gears used with mabuchi motor)
-final gearmotor: 22RPM @5V drawing 40mA, no load
-power supply : 4.8VDC Ni-Cd battery
![]()
SCHEMATICS
My first basic circuit I had in mind
The second circuit with Wilf's suggestions..
The FINAL circuit, now complete :-)
![]()
PHOTOS
Side View :
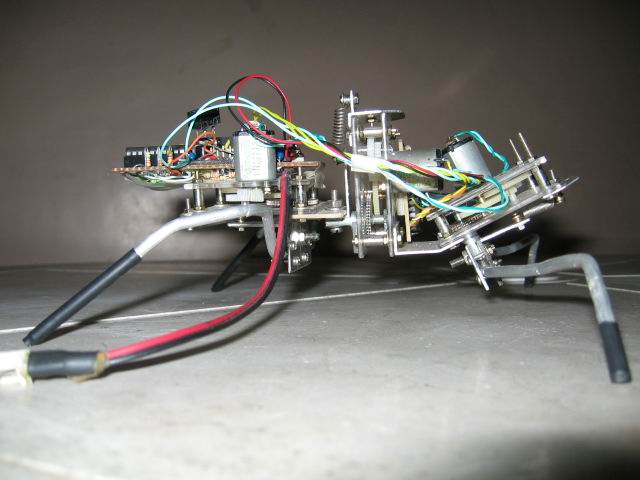
Front / Side View :

Top View :
The Main Circuit Board :
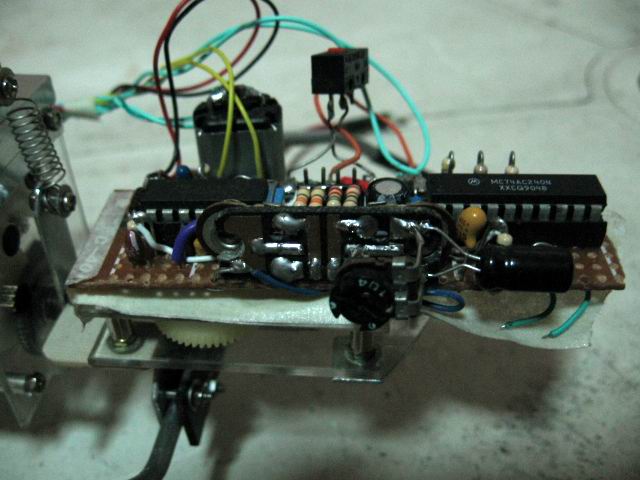
The Second Board , 74AC245 motor driver :
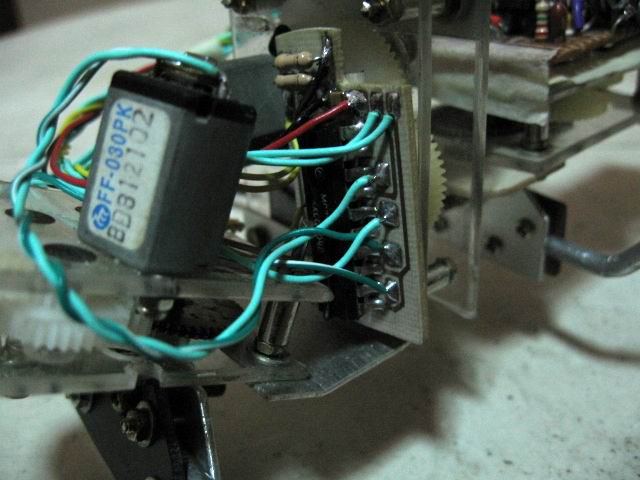
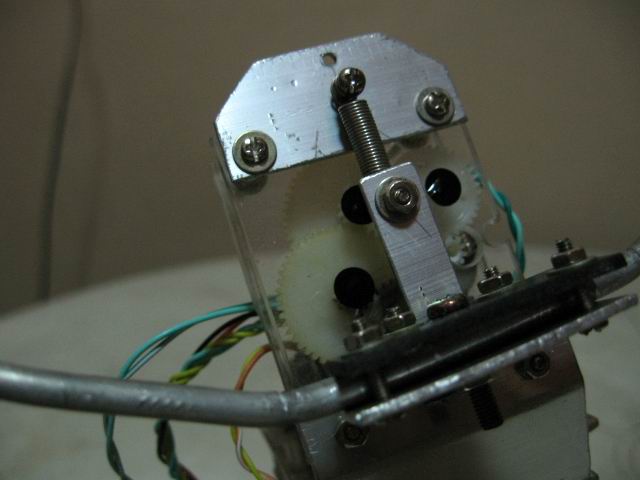
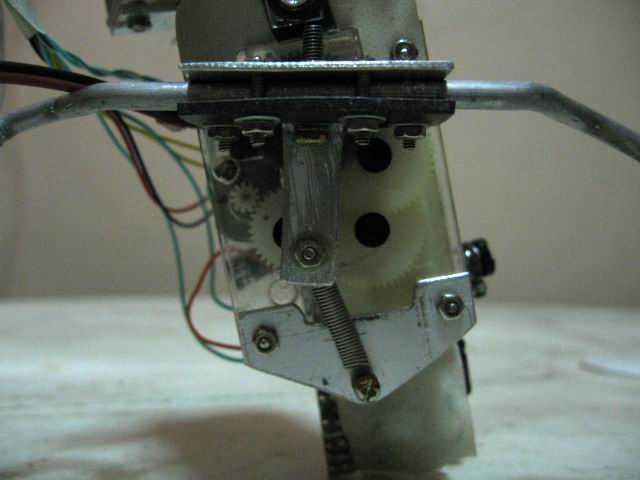
Waist Gearmotor w/ centering spring :
Stretch !!! :

Butt Sit c".) :

Front Gearmotor w/ centering Spring :
Rear Gearmotor w/ centering spring :
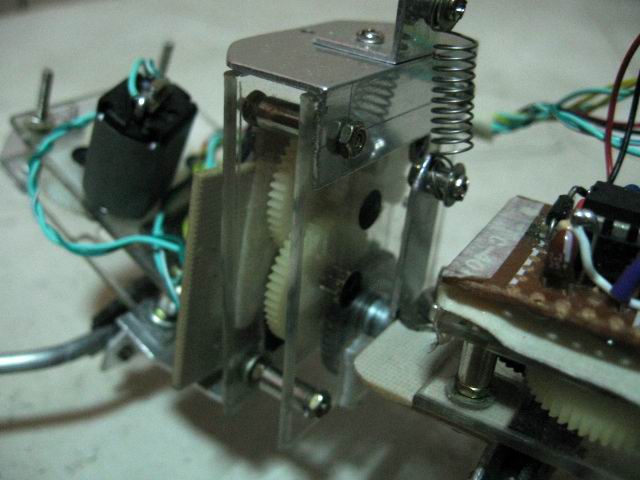
Front View of Waist Gearmotor:
Note:
Pardon for the dark pictures.. still getting the hang of my new digicam... :) No FLASH(except the 1st picture) and under flourecent light only...
![]()
VIDEOS :
3M_4Nv 2.11Mb
Note:
I have not video'd the reverse, Lift, turn, phototropic functions(Have confirmed that they work, But I had removed the sensors before I had bought this digicam.. sorry) because Im gonna use the waist Gearmotor for my Vbug walkman clone RE-build..I have posted some pictures/videos earlier at yahoobroups..Just check it there..thank you
![]()
Additional NOTES :
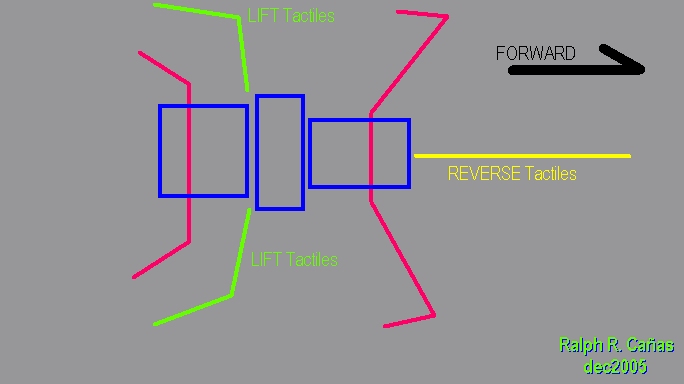
![]() Lift Tactiles = used to clear obstacles on
the REAR legs.. it Lifts them MUCH higher, so its function is just like
the Vbug Walkman (BackSW,BRsW).. so position them as shown in the diagram:
Lift Tactiles = used to clear obstacles on
the REAR legs.. it Lifts them MUCH higher, so its function is just like
the Vbug Walkman (BackSW,BRsW).. so position them as shown in the diagram:
![]() When you "disconnect" or disable the
phototropic behaviour, the Nv net SLOWS DOWN...
When you "disconnect" or disable the
phototropic behaviour, the Nv net SLOWS DOWN...
![]() When using robots with "WAIST",
always use LOWER RPM for higher Torque
When using robots with "WAIST",
always use LOWER RPM for higher Torque
![]()
Copyright
©
2005 by
Ralph R. Cañas.
All Rights Reserved.
![]()
![]()
BEAM Patents by Mark W. Tilden.
Special thanks to: Solarbotics for giving me this web space (thanks Dave) , Mr. Mark Tilden (BEAM is nothing without you), and finally, Wilf Rigter for helping me out with this walker (thanks Wilf)

DONT GIVE UP!!! LET THAT ROBOT GO n WALK on ITS OWN :-)
![]()
Visitor since December 2005:
BACK TO BEAM MAIN
![]()