![]() VBug Walkman
Clone
VBug Walkman
Clone![]()
--- A 5-motor 4-legged walker RE-BUILD ----
-----
UNDER CONSTRUCTION
![]() UNDER CONSTRUCTION -----
UNDER CONSTRUCTION -----
This is 5 motor 4 legged walker <Vbug Walkman> clone originally made by Mark Tilden. The Most adaptive 4 legged walker I have seen so far..and quite impressive at that.. :-)
SPECS:
-motor used : mabuchi F030 series (WAIST) and mabuchi PPN13KA10 (LEGS)
-gears : from 5/6RPM crystal ball motor (hacked, gears used with mabuchi motor) (WAIST)
-gears : from 16RPM crystal ball motor (hacked, gears used with mabuchi motor) (LEGS)
-final gearmotor: (WAIST) 22RPM @5V drawing 40mA, no load & (LEGS) 74RPM @5V drawing 40mA, no load
-power supply : 4.8VDC Ni-Cd battery
![]()
SCHEMATICS
The circuit:
![]() As of January 13, 2005
As of January 13, 2005
![]()
![]() Added LB1639 chip as waist gear
motor BOOSTER ( I think current output maxed at 500mA?)
Added LB1639 chip as waist gear
motor BOOSTER ( I think current output maxed at 500mA?)
![]() Stacked another 74AC240 chip
for the LEG drivers
Stacked another 74AC240 chip
for the LEG drivers
![]()
PHOTOS
Preliminary PICS:
<right click on picture/ open in new window> for clearer view (high res)
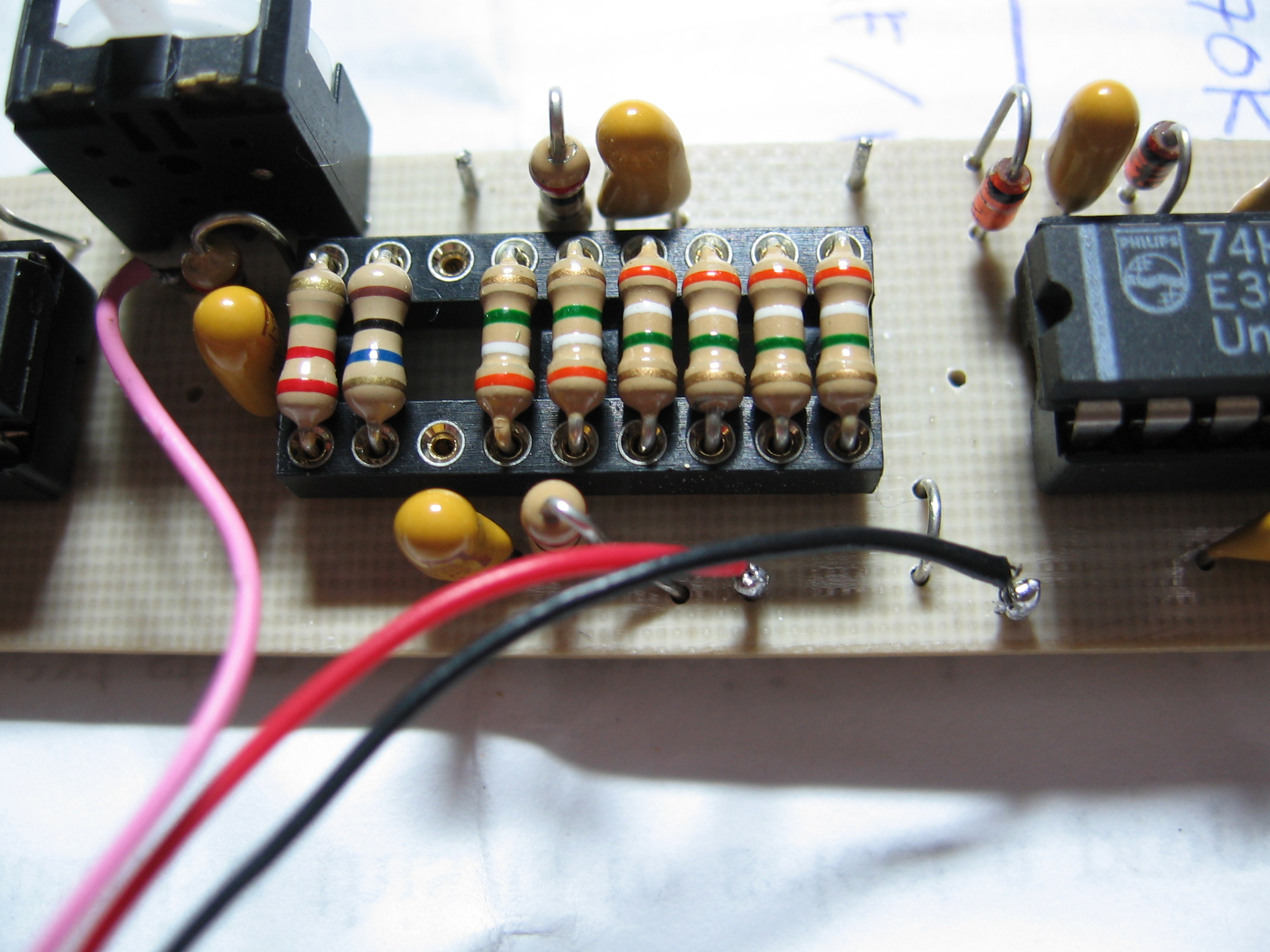 |
The resistor values I have used... Still EXPERIMENTING with the "crabwalk" though..... So these are not final YET.... (2272 x 1704) |
 |
The WAIST GEARMOTOR. Originally from my 3M 4 legged walker.... :-) my most powerfull <high-torque> gearmotor YET..manually made... (1024 x 768) |
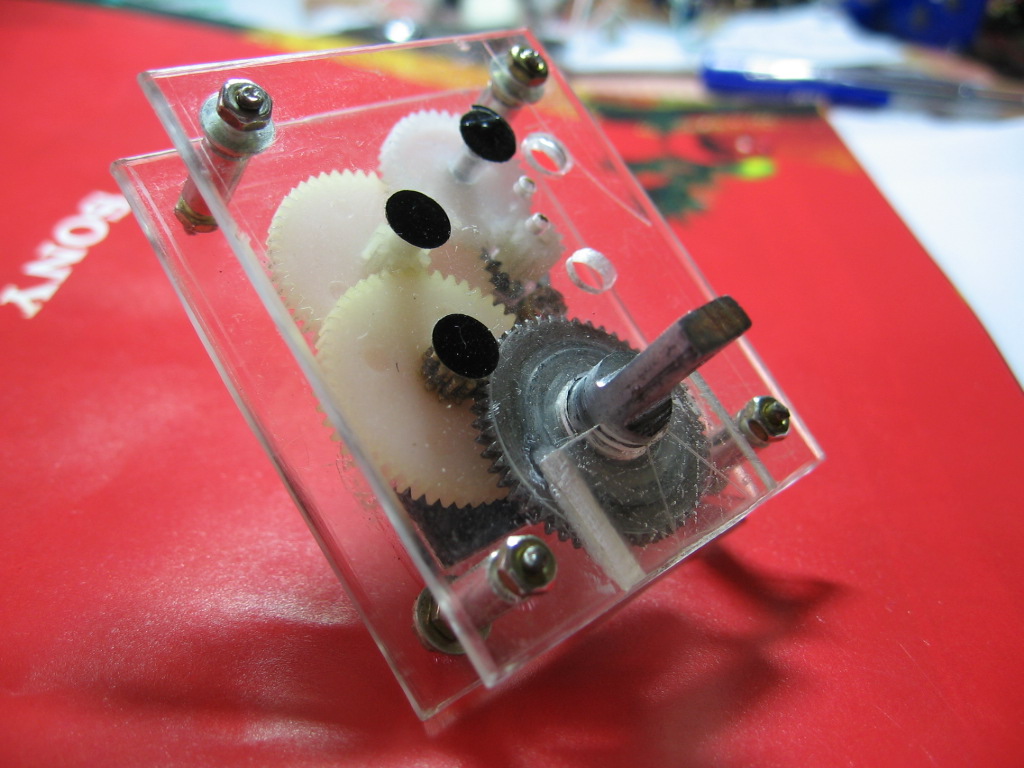 |
Another VIEW (1024 x 768) |
 |
The motor F030. note the PCB / ceramic capacitor "spike suppressor" at the motor terminals (1024 x 768) |
 |
The motor F030. And the PPN13KA10 |
 |
The LEG/s Gearmotor |
 |
The Legs Gearmotor TOP View |
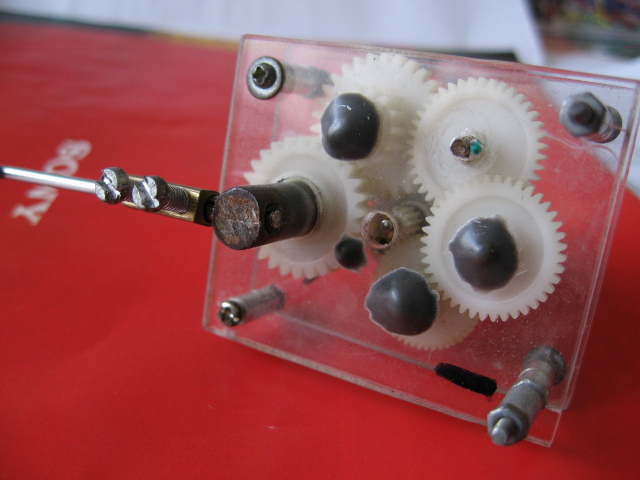 |
LEGS gearmotor Underside |
------------ MORE TO COME -------------
![]()

![]()
VIDEOS :
Forward Reverse only (preliminary) 3.42mB
Walker
Video in forward and reverse only.... this is my 7th take on the walker
configuration.. It walks BAD when going forward BUT is great when reversing...
whew..need to reconfigure AGAIN... :-) does not really matter as long as the
circuit works.. Anyways, need more time AGAIN on this part.. have to dis-assemble
again.. NEED more time... till then..... :)
![]()
As of December 27, 2005
I am putting this
walker project ON
HOLD... Due to lack of money
// buying 4 servos (to be used as LEG/S gearmotors )...I believe that this
project will walk straight as an arrow when all leg gearmotors are IDENTICAL in
RPM/Make/Etc... I hope in 2 - 3 months time, I could obtain 4 servos already. Do
take note that I have figured out ALL the electronics side and Its
behavior already. Its VERY HARD to balance a 5 motor robot with un equal
RPM/s per leg... My last 6 takes proved this... It sort of walked FORWARD + a
bit of sideways.. :( I have a powerful waistmotor (22RPM @ 5V, 40mA free
running) that would suffice the requirements for this 5 motor walker... So bear
with me for the moment.. If you cant wait, then send me 4 SERVOS.. any CHEAP
brand will do.. :-) as long as they are all identical... thank you!
![]()
Copyright
©
2005 by
Ralph R. Cañas.
All Rights Reserved.
![]()
![]()
BEAM Patents by Mark W. Tilden.
Special thanks to: Solarbotics for giving me this web space (thanks Dave) , Mr. Mark Tilden (BEAM is nothing without you), Harold Ilano for other useful info (Thanks Bro)

DON'T GIVE UP!!! LET THAT ROBOT GO n WALK on ITS OWN :-)
![]()
Visitor since December 2005:
BACK TO BEAM MAIN
![]()